山口研究室
| 指導教員 | 山口博明 教授 工藤聖人 助手 |
|---|---|
| テーマ | 先端知能ロボット工学研究 1.飛行ロボットの動作計画 2.波動歩行機械の設計・制御 3.マルチステアリング・マルチトレーラシステムの制御 4.複数の移動ロボットから構成される群のフォーメーション制御 5.仮想エージェントによる複数車両の協調的ナビゲーション法の構築 6.計算幾何学に基づく非ホロノミックな拘束を有する移動ロボットの経路探索法 |
研究内容
本研究室では、移動・飛行ロボット工学の分野において、(A)単体の移動・飛行ロボットの高精度な経路・軌道追従制御、(B)複数の移動・飛行ロボットから構成される群の自律分散型制御、(C)マルチエージェントシステムにおける自律分散型協調・競合解決のための行動アルゴリズムの設計、(D)渋滞現象などを解明するための多数の車両から構成される交通シミュレータの開発、(E)高速道路上における輸送効率を向上させるための複数の車両から構成される隊列の自律分散型制御、(F)大型重量構造物の自動搬送を目的とした多重連結車両システムの開発と制御、(G)慣性走行を可能にする波動歩行機械の開発と制御、 (H)人間が入り込めない狭隘環境における検査作業の自動化を目的としたヘビ型ロボットの開発と制御、(I)動作環境内の障害物との干渉回避を考慮した計算幾何学に基づく移動・飛行ロボットの確率論的動作計画、これらの課題についてコンピュータを駆使して研究を展開しております。
自動車に代表される移動性を有するロボットシステムは、人類の経済活動を支える基盤を構成する重要な要素の一つであり、その技術の継続的な進歩を促すことは必須であると考えられます。
近年、低炭素社会の実現に向けて、従来の内燃機関自動車よりも環境性能の高い電気自動車へのシフトが急速に進んでおります。これに合わせて自動車の構造も大幅に簡素化され、一つのアクチュエータ(内燃機関)から変速機を介して動力を引き出すという設計の概念、これは、ある意味設計上の拘束条件であり、これから解き放たれ、複数のアクチュエータ(モータ)を分散的に配置し、個々の箇所で動力をダイレクトに引き出すという新しい設計の概念に基づいて、移動性の実現を見直す機会が到来しております。
今、まさに、新たな移動性を有する機械、ロボットの開発が注目を集めています。特に、波動歩行(undulatory locomotion)は、ローラスケートなどの慣性走行(勢いをつけて滑り続けるように移動する)を容易に実現することができる環境負荷の小さい移動原理であると考えられています。
本研究室では、新たな波動歩行機械の設計と制御ならびにその有効性の実験的な検証を行っております。また、空の産業革命をもたらすと期待されている無人航空機(ドローン)により、高層ビル、送電線の鉄塔、化学プラントなどの検査作業の効率化を実現するための飛行動作計画法、ならびに、屋外のみならず屋内において、人間と共存しながら作業支援を可能にする調和的自律飛行制御法の研究を行っております。
飛行ロボットの動作計画
高層ビル、送電線の鉄塔、化学プラントなどの検査作業の効率化を目的として、1自由度(チルト角)しか有さない雲台を介してカメラが搭載されたクアッドロータ型無人航空機(ドローン)により、複数の目標対象物の画像を、ホバーリングして姿勢を変えるなどの動作を含まずに、連続して撮影するための自動軌道追従制御系の設計を行っています。
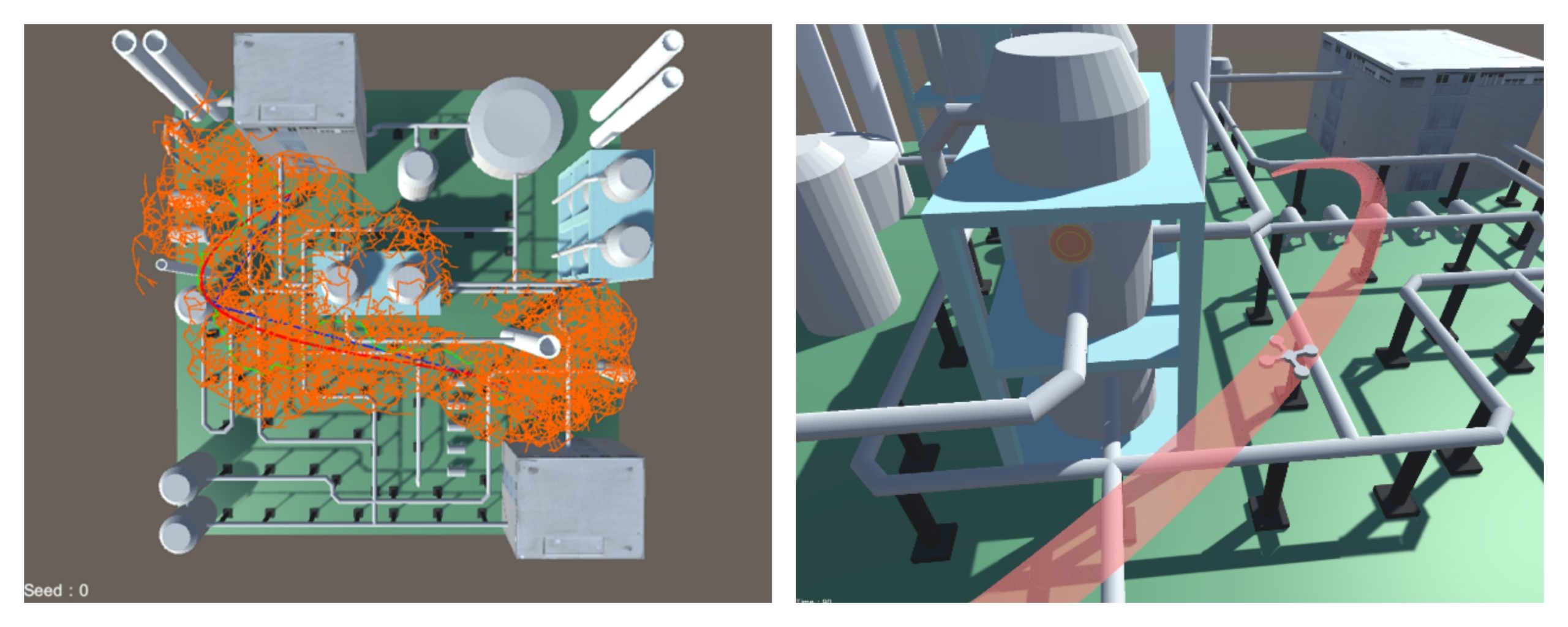
(左)RRTによる飛行動作計画、(右)クアッドロータ型無人航空機の軌道追従制御
波動歩行機械の設計・制御
移動性を有する機械の典型として自動車があります。この自動車と全く異なる原理により移動する機械として波動歩行機械があります。波動歩行とは、体形の周期的な変化をその移動に変換することであり、生物のヘビは波動歩行により移動します。本研究では、波動歩行の可能性を探り工学的な応用を実現するための研究を、実験機を開発しながら行います。
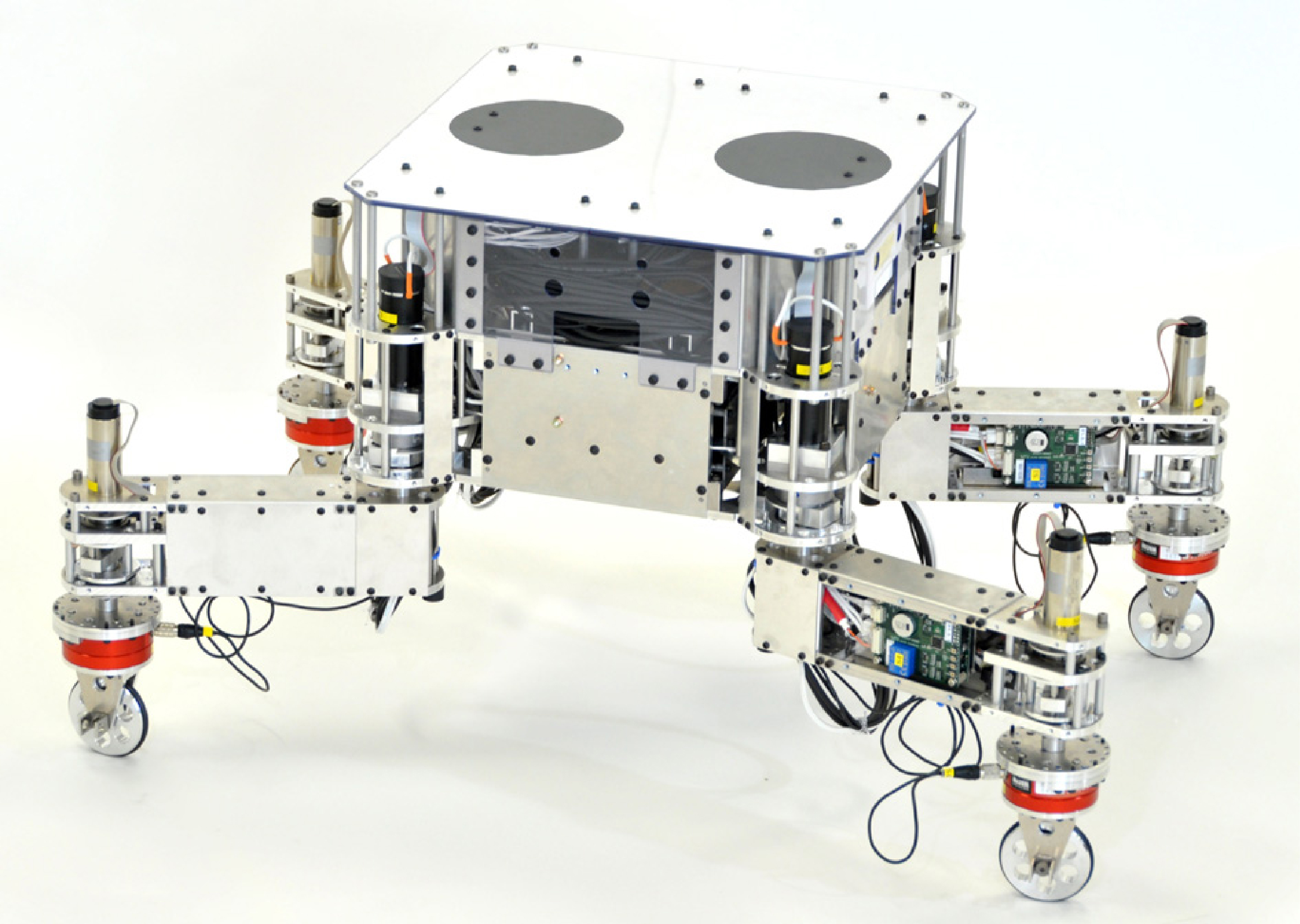
4叉移動機構
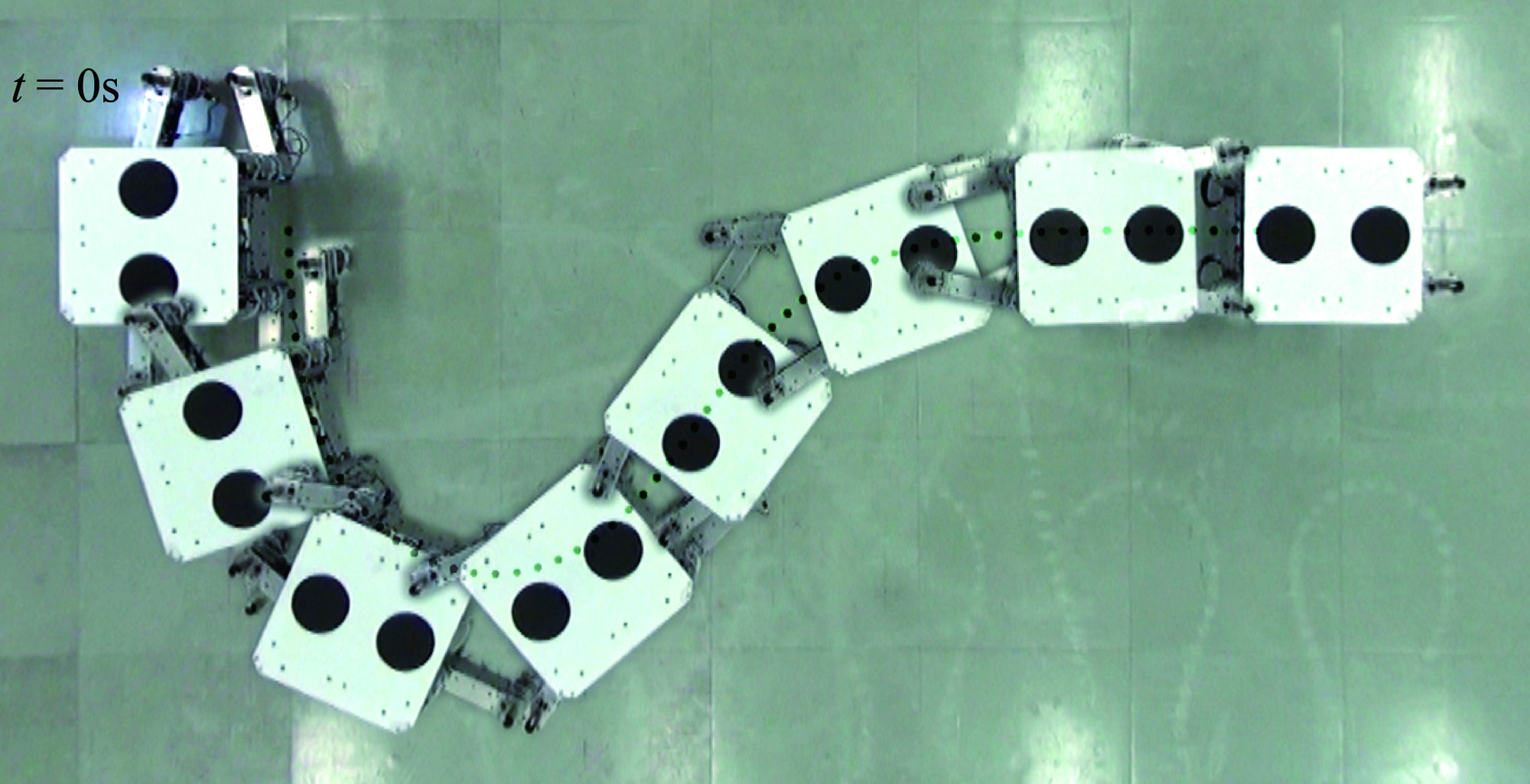
曲線経路追従動作
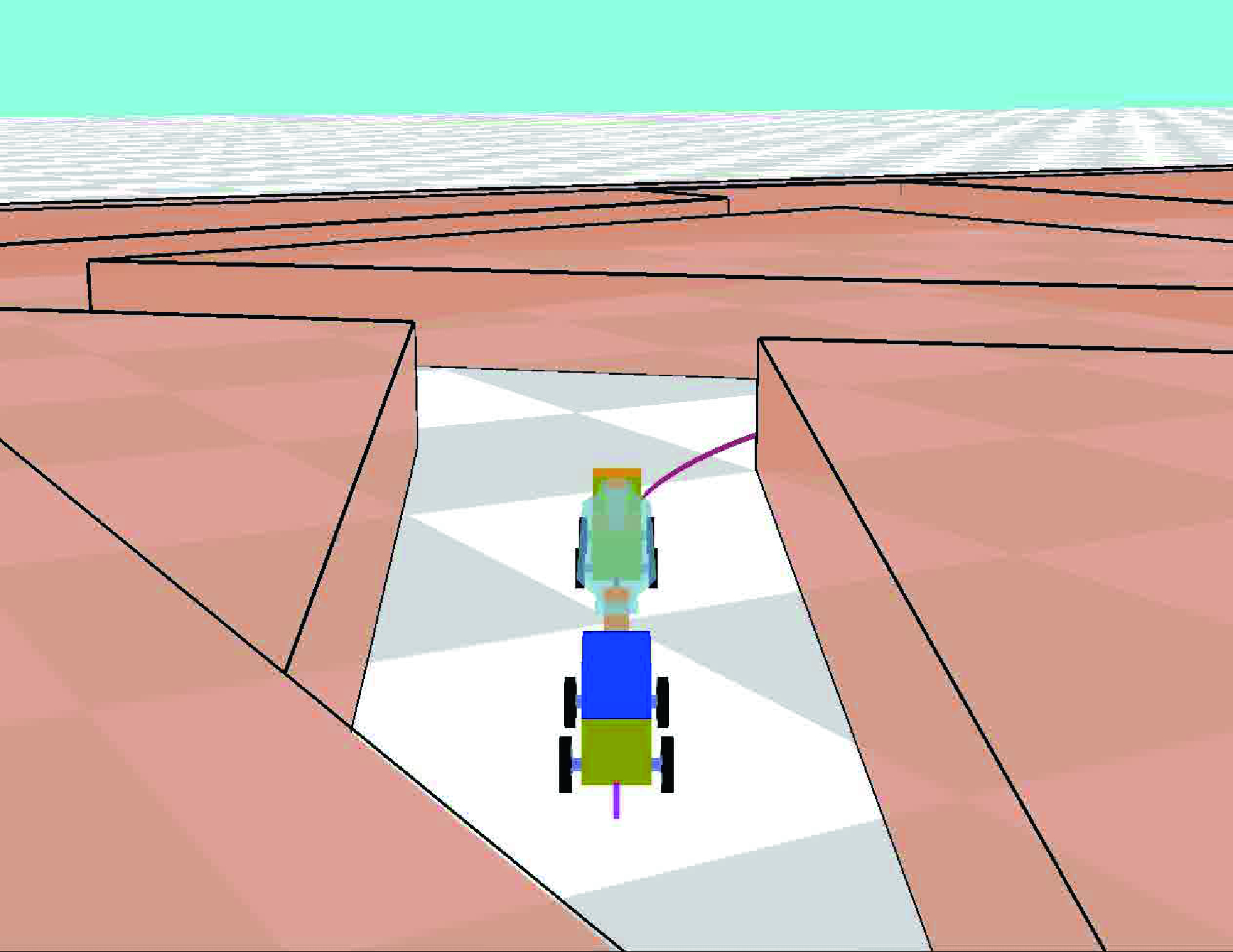
マルチステアリング・マルチトレーラシステムの制御
大型構造物の搬送作業の自動化を目的として、5つの車軸と3つのステアリングを有する連結車両システムを構成し、このマルチステアリング・マルチトレーラシステムの制御法を導き、その有効性を実験機により検証します。特に、微分幾何学に基づくフィードバック制御法の研究を行いながら、同時に、実験機の開発を進めます。
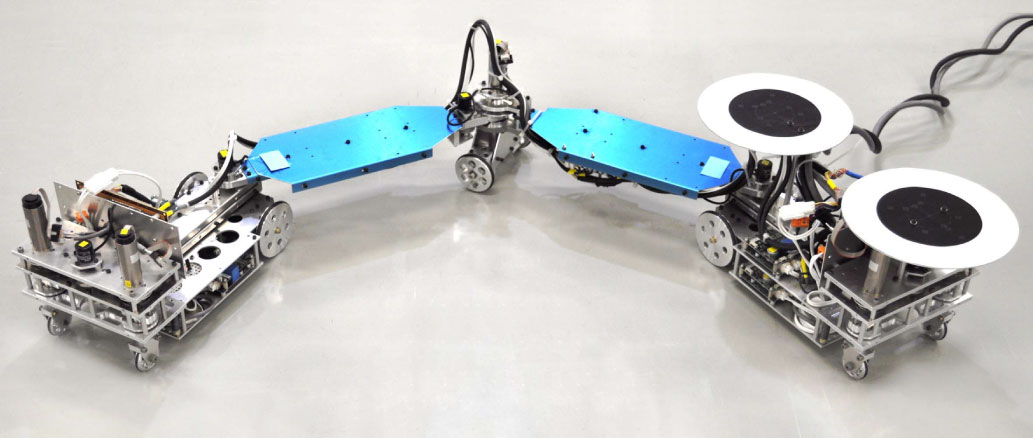
5つの車軸と3つのステアリングを有する連結車両システム

車庫入れ動作
複数の移動ロボットから構成される群のフォーメーション制御
複数の移動ロボットから構成される群のフォーメーションを自律分散的に制御するためのアルゴリズムの研究を行っています。特に、移動ロボット間の局所的な通信を用いて情報を伝播することにより群全体の調和を取るなど、自律分散的な協調行動の実現に焦点を合わせて研究を行います。
仮想エージェントによる複数車両の協調的ナビゲーション法の構築
複数の車両から構成される輸送システムにおいて、車両間の競合を解消してシステム全体の輸送効率を向上させるために、車車間通信を介して導入する仮想エージェントを用いて車両間の協調的走行を実現するナビゲーション法の研究を行っています。
計算幾何学に基づく非ホロノミックな拘束を有する移動ロボットの経路探索法
移動ロボットが与えられた仕事(例えば荷物の搬送など)を達成するために必要な移動経路を自動的に探索する方法を研究しています。特に、移動ロボットの車輪が車軸の方向に横滑りしない非ホロノミックな拘束条件を満たしながら経路を探索する方法の研究を行います。
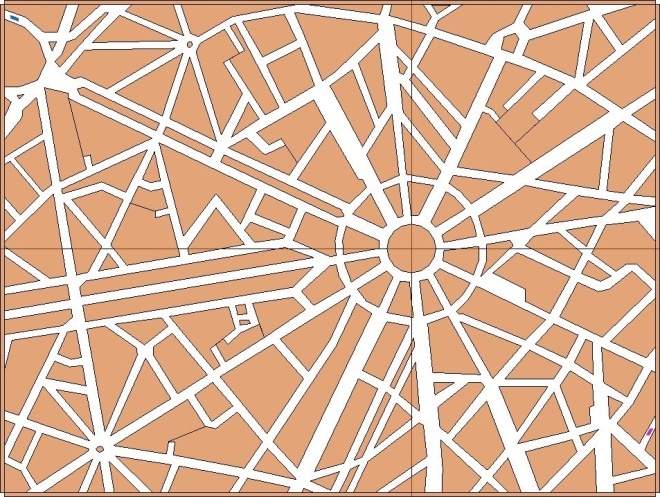
(a)フランス、パリ、凱旋門付近の地図
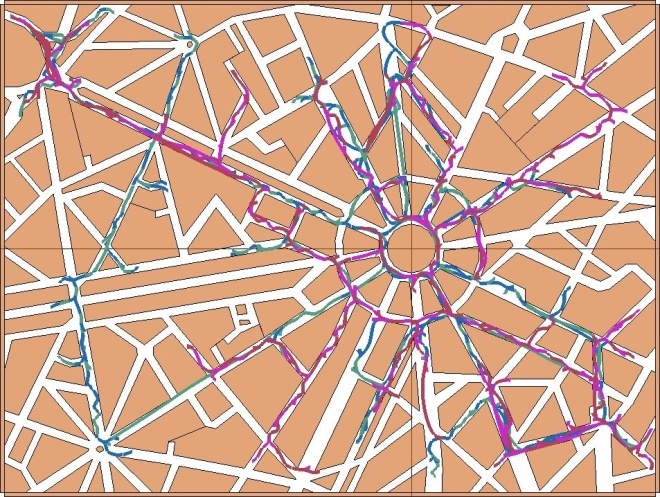
(b)RRT-connectによる探索空間の構造化
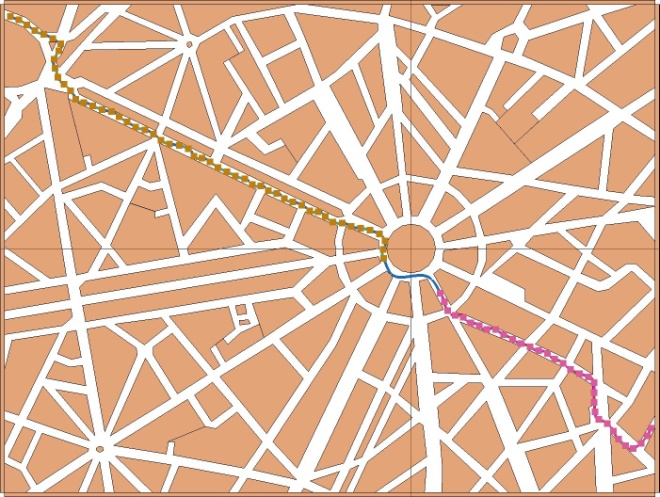
(c)生成された経路
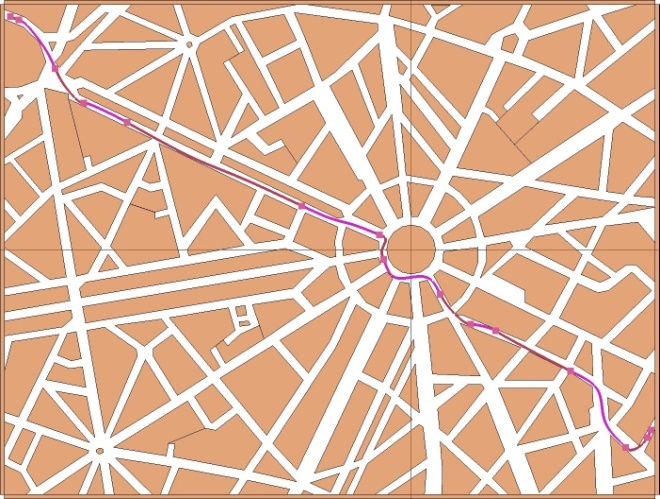
(b)RRT-connectによる探索空間の構造化(d)経路のスムース化
経路追従動作
研究者情報
| 教授:山口博明 | |
| 学位 | 博士(工学) |
| 所属学会 | 日本機械学会、計測自動制御学会、日本ロボット学会、精密工学会 |
| 研究分野 | ロボット工学、制御工学 |
| 助手:工藤聖人 | |
| 学位 | 修士(工学) |
| 研究分野 | ロボット工学 |