-
構成メンバー
情報テクノロジー学科 教 授 山口 博明 (代表者) 2018年6月1日~2023年3月31日 情報テクノロジー学科 助 教
(当時)米澤 直晃 2018年6月1日~2023年3月31日 -
概要
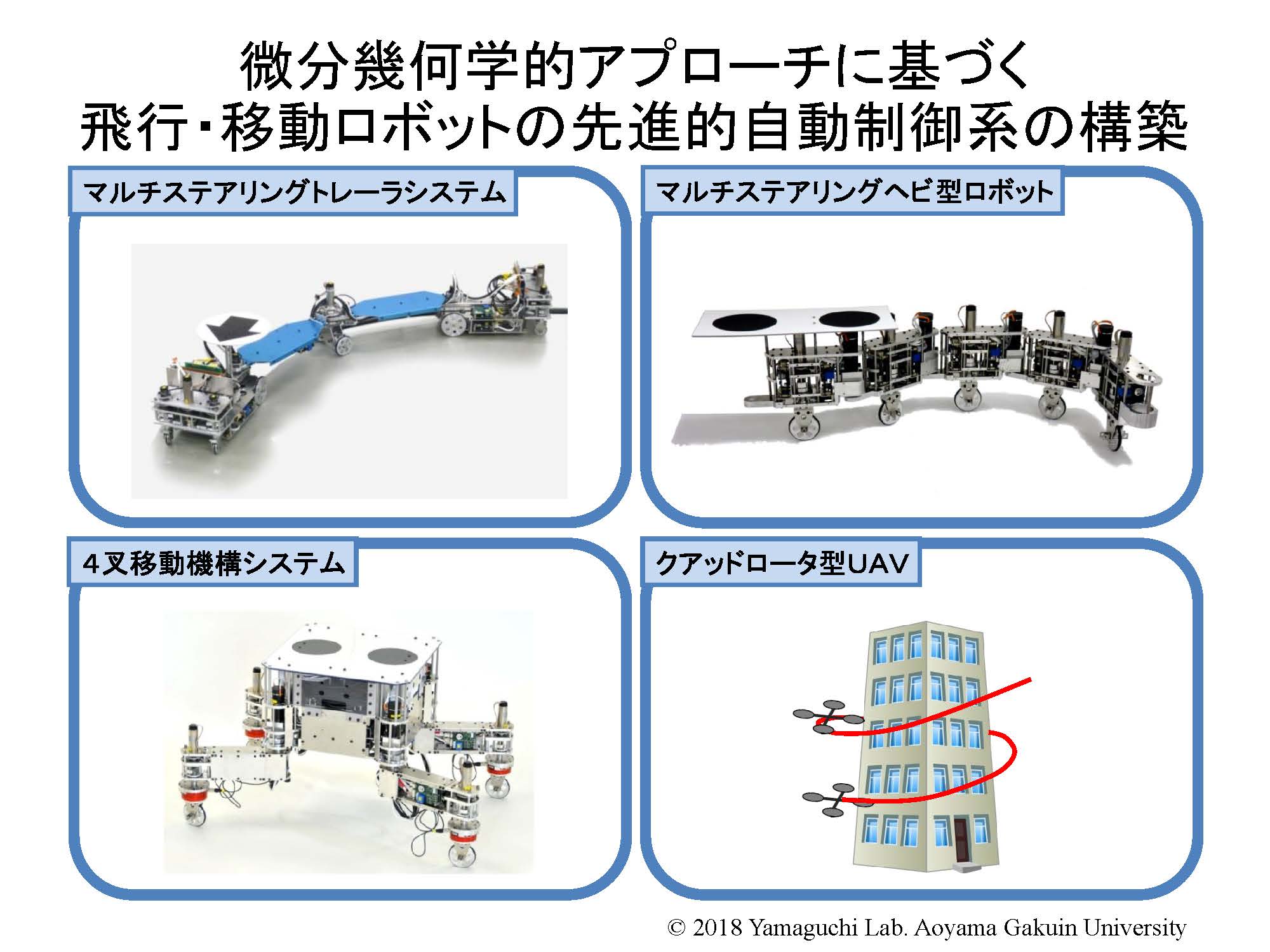
本研究では、飛行・移動ロボットの先進的自動制御系の構築を目的としている。具体的には、(A)鉄道車両などの大型重量構造物の搬送の自動化のための「自動走行マルチステアリングトレーラシステムの制御系の設計」、(B)原子力発電所などの人間が入り込めない環境における検査作業の自動化のための「自動走行マルチステアリングヘビ型ロボットシステムの制御系の設計」、(C)より高い運動性能の実現のための「4叉移動機構システムの制御系の設計」、(D)高層ビルなどの人間の落下のリスクの高い環境における検査作業の自動化のための「カメラを搭載した無人航空機(ドローン)システムの自動飛行制御系の設計」の研究に取り組んでいる。